
对于工业机器人机床上下料搬运系统而言,机器人搬运的动作可分解为抓取工件、移动工件、放置工件等一系列子任务,还可以进一步分解为把吸盘等末端执行器移到工件上方、抓取工件等一系列动作。
工业机器人机床上下料搬运系统的示教编程本质上就是机器人搬运的一个具体应用,把工件由上料位置搬运到数控机床上,再把加工完成的工件从数控机床上拆卸下来,然后搬运到工件放料位置,如此循环往复,如图 3.24 所示。其作业流程如图 3.25 所示。
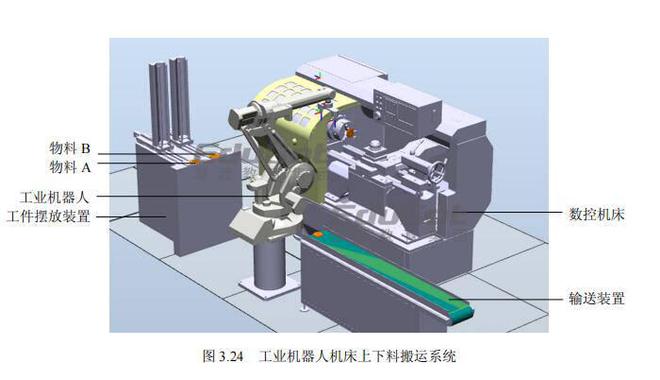
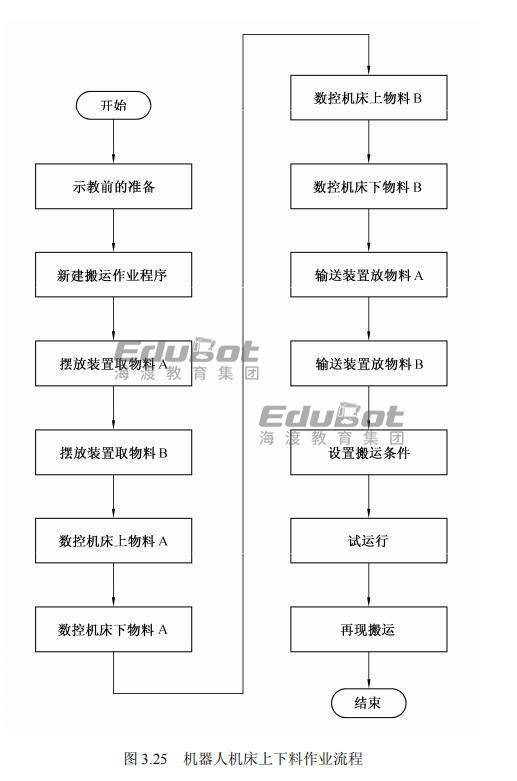
本例中的程序点包括机器人安全点、取和放物料 A、机床上下物料 A、取和放物料 B、机床上下kaiyun体育全站 Kaiyun登录网页物料 B。
在示教模式下,手动操纵机器人进行机床上下料程序点位的示教,并记录保存。且在示教过程中需要确保末端执行器与工件、工件摆放装置等互不干涉,搬运顺序无误。
(2)依据实际情况,配置在搬运作业中需要用到的 I/O 信号及其他参数,尤其是机器人与机床之间的通信关系。
所有程序点示教完成和作业条件设定后,机器人会自动生成并记录相应的搬运运动程序。
确认搬运机器人周围安全后,对整个搬运程序进行逐行试运行测试,以便检查各程序点位置及参数设置是否正确。


 官方微信
官方微信





