
在第十届恰佩克活动全国高校机器人产教融合发展暨全国高校机器人学院院长论坛上的演讲

2022年中国汽车保有量3.19亿辆,同比增长5.63%,市场规模1118.59亿元。我国是世界汽车轮毂生产大国,每年产将近7~8亿。
轮毂是汽车的重要零部件,直接关系到汽车的整体性能及外观。为减轻重量,提高制造精度,减小惯性阻力,减少油耗,改善外观,大多采用合金材质轮毂,如铝、镁合金和钢等。
汽车轮毂最终的外观质量“七分靠磨抛,三分靠电镀”,表面磨抛是汽车轮毂生产过程中的一项重要工艺。
轮毂的结构复杂,品种、型式多样,连续接触式轮毂抛光自动化难度大。目前仍主要依赖于人工抛光:
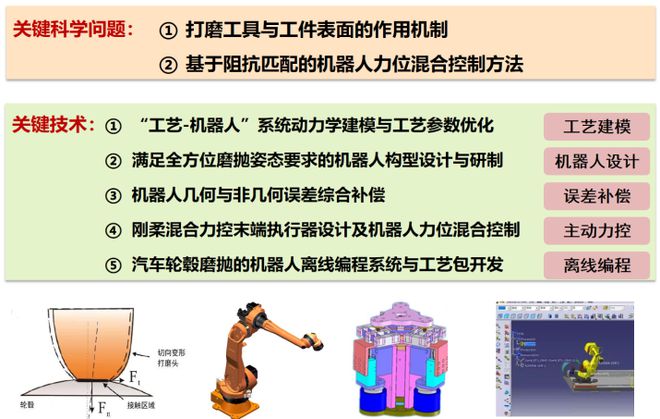
1.机器人磨抛工艺研究不足:缺乏系统性的研究方法和有效的材料去除率模型,磨抛工艺参数主要凭经验选择;
2.机器人的绝对定位精度偏低:传统的几何参数标定方法难于有效提高机器人的绝对定位精度,影响了离线编程方法的应用;
3.主动力控制技术不完善:工业机器人多不具备力控功能,现有气动力控末端执行器动态响应慢、灵活度差,难于保证轮毂磨抛质量一致性;
4.缺少轮毂磨抛专用离线编程系统与工艺软件包:主要依赖商用CAD/CAM软件,人工干预多,编程效率低。
解决方案:设计了侧端偏置手腕结构,优化5、6轴系传动与支撑;基于重心集中设计思想,所有关节与杆件结构动态优化;基于刚柔耦合模型进行机器人机构动态优化,完成了机器人机构设计。
解决方案:基于手腕侧端偏置结构特点,构建了新型的非线性方程组,减少计算量;

解决方案:建立了基于评价指标的优选工作空间机制,优选出机器人高灵活性运动空间;基于机器人末端位置和姿态变化阈值,提出了改进的DP算法,优选加工路径点。
解决方案:提出局部指数积公式建立机器人几何误差模型,采用最小二乘法对参数进行辨识,并对误差进行补偿;提出高斯学习方法实现机器人非几何误差模型建立与误差补偿。
研究目标:研发一种新型精度高、响应快、柔性好、质量轻的单自由度气电混合式力控末端执行器,以实现高精度接触力控制,满足工业机器人抛光、打磨、去毛刺等连续接触式作业。
解决方案:气电混合并联驱动,既提高力控精度,有效缓和冲击与振动,提高力控稳定性;电动部分采用音圈电机直驱,动态响应快,力控精度高;增加拉伸弹簧,可有效补偿重力,又提高了系统刚度和动态响应。
研究问题:基于动力学模型的控制方法,虽然可以提高响应速度和稳态精度,由于物理建模与数据建模过程存在模型误差和参数误差,力控性能仍受限。
研究目标:研制具有两转动一平动(2R1T)自由度的力控末端执行器,用于复杂曲面磨抛作业。具备简洁的运动学关系、低运动质量。
解决方案:采用结构紧凑、刚度高的3PPS并联机构,基于“零扭转”特性和改进的姿态描述方法推导了解析且线性的位移正解,便于机构设计与控制;柔性铰链(导轨)刚柔混合设计,低运动质量、无摩擦;主动关节采用音圈电机直驱,高动态响应。
研究问题:传统机器人应用通常将末端执行器视为刚体,难以补偿2R1T力控末端执行器倾角变化导致的接触点偏移,降低了宏微机器人磨抛系统的力控精度。
研究问题:磨具与工件存在接触倾角,如何预测法向接触力随接触倾角和工件曲率的变化。
解决方案:通过微分几何分析,得到以接触倾角和工件曲率半径为变量的接触深度分布函数;基于非线性应力-应变模型,进一步得到幂函数形式表达的法向接触力半解析公式。
解决方案:提出了以表面粗糙度为评价指标的工艺参数分析模型,更适合机器人的抛光作业;基于多因素正交实验方法,确定最主要影响因素及各工艺参数的最优值。
解决方案:由工件三维数模直接生成机kaiyun体育全站 Kaiyun登录网页器人程序,大幅度提高了复杂空间曲面的离线编程效率;提出了工具轨迹优化方法,工件曲面的UV线-轨迹/轮廓偏差-优化,加工平顺性和加工质量;实现了机器人离线运动仿真,仿真后的数据可直接导出为机器人程序。
解决方案:建立了磨抛工具库与工艺数据库,定义了不同型号,不同区域的抛光工具及工艺参数;开发了轮毂磨抛专用工艺软件包,推荐优化工艺参数与工具,提高磨抛效率与质量
针对轮毂磨抛需求,研发了6款力控末端执行器、1款磨抛机器人(腕端运动范围360°)和2个应用示范单元(小尺寸简单轮毂磨抛和大尺寸复杂轮毂磨抛)。

1.轮毂磨抛建模与工艺参数优化:提出了磨抛过程的半解析接触力模型;提出了轮毂表面粗糙度模型的工艺参数优化方法。
2.机器人系统研制与参数标定:研发了腕端360°转动的磨抛机器人系统,提出了两步法逆解求取方法;提出了机器人几何与非几何误差参数辨识与误差补偿方法。
3.力控末端执行器与机器人力位混合控制:研发了6款力控末端执行器,满足不同磨抛应用需求;提出了基于双力矩传感器和接触点位姿补偿的机器人力控方法。
4.离线编程系统与工艺软件包开发:开发了轮毂磨抛机器人离线编程系统,开发了轮毂磨抛工艺软件包。
5.产教融合:场景认知-主动学习;目标导向-引领创新创业;学科交叉,科研促进教学。
面向复杂弹性表面处理需求,开发了集智能检测与机器人修补工艺结合的重载复合机器人系统。
轮毂加工去毛刺工艺,目前以人工为主,粉尘和劳动强度是最大挑战,团队已完成轮毂自动去毛刺机器人开发工作,形成了轮毂自动去毛刺工作站。借助轮毂2D图纸/3D模型自动规划窗口去毛刺路径,通过高精度2D相机识别与定位,实现轮毂自动化混线去毛刺加工。

凡资讯来源注明为其他媒体来源的信息,均为转载自其他媒体,并不代表本网赞同其观点,也不代表本网对其真实性负责,转载请联系原出处。您若对该文章内容有任何疑问或质疑,请立即与后台小编联系,平台将迅速给您回应并做处理。注明本公司原创内容,转载请与我们联系。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
金融专业已严重过剩?经济学家:别因为数学好就报金融专业,行业绝对容不下太多金融毕业生【附金融学专业发展情况】
惊天动地的震撼!俄军投下了人类有史以来第一枚 FAB3000 重型航弹
江苏润阳40亿IPO发行注册过期:润阳云南开始裁员,世界第三的痛只有他们知道!
独家授权 颜值爆表!蓝戟A750 PHOTON 8G OC艾尔登法环黄金树幽影联名款评测
优派推出 27 英寸 2K 185Hz 显示器 VX2779-2K-PRO-W,1099 元


 官方微信
官方微信





