
(如运行许可、故障确认、程序启动等)。机器人控制系统向上级控制系统发送有关运行状态和故障状态的
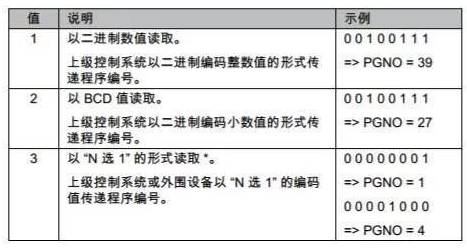
输入端 (从机器人控制器的角度)PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号。
PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。值域:1 … 16。若 PGNO_TYPE 的值为 2,则只允许位宽为 4、8、12 和 16。PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。

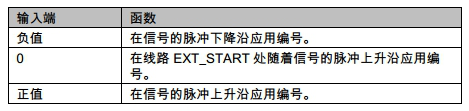
$EXT_START - 外部启动设定了该输入端后,输入 / 输出接口激活时将启动或继续一个程序 (一般为 CELL.SRC)。备注:仅分析信号的脉冲上升沿。在外部自动运行中无 BCO 运行。这表明,机器人在启动之后以编程设定的速度 (没有减速)到达第一个编程设定的位置,并且不停在那里。
$MOVE_ENABLE - 允许运行该输入端用于由上级控制器对机器人驱动器进行检查。

备注:当驱动装置由上级控制器停住后,将显示 “ 开通全部运行 ” 的信息提示。删除了该信息提示并且重新发出外部启动信号后机器人才能重新运动。投入运行时变量 $MOVE_ENABLE 常常设计为值 $IN[1025]。如果此后忘记设计另一个输入端,则不能外部启动。
$CONF_MESS - 确认信息提示通过给该输入端赋值,当故障原因排除后,上级控制器将自己确认故障信息。备注:仅分析信号的脉冲上升沿。
$DRIVES_ON - 驱动装置接通如果在此输入端上施加了持续至少20毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。
$DRIVES_OFF - 驱动装置关闭如果在此输入端上施加了持续至少20毫秒的低脉冲,则上级控制系统会关断机器人驱动装置。输出端 (从机器人控制器的角度)
$ALARM_STOP - 紧急停止该输出端将在出现以下紧急停止情形时复位:1.按下了库卡控制面板 (KCP)上的紧急停止按键。(内部紧急关断)2.外部紧急停止注意:出现紧急停止时可从输出端 $ALARM_STOP 和 Int. NotAus 的状态看出是哪种紧急停止:两个输出端均为 FALSE:触发了库卡控制面板 (KCP)上的紧急停止按键
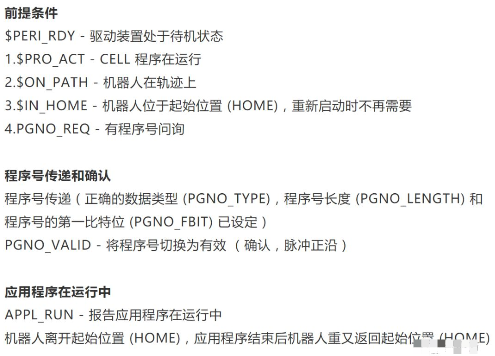
$PERI_RDY - 驱动装置处于待机状态通过设定此输出端机器人控制系统通知上级控制系统机器人驱动装置已接通。
$STOPMESS - 停止信息该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求停住机器人的信息提示。(例如:紧急停止按键、运行开通或操作人员防护装置)确认信息提示前提条件 $STOPMESS - 有停止信息确认信息提示 $CONF_MESS - 确认信息提示可确认的信息提示就此删除 $STOPMESS - 不再有停止信息,现在可撤回 $CONF_MESS。

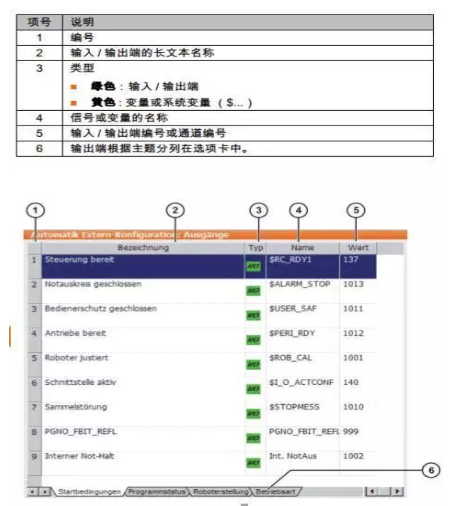
操作步骤1. 在主菜单中选择配置 》 输入 / 输出端 》 外部自动运行。2. 在数值栏中标定所需编辑的单元格,然后点击编辑。3. 输入所需数值,并用 OK 加以保存。4. 对所有待编辑的数值重复第 2 和第 3 步。5. 关闭窗口。改动即被应用。
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
案例。用到的设备为西门子1200PLC一台,EtherCAT转profinet(Profinet转EtherCAT)网关一个,EPR6-S
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。 如今的智能电话
点就是在移Kaiyun体育官方网站 开云登录网站动端能看到的信息,本文共设置了五个数据点分别为:采摘数量、相机Kaiyun体育官方网站 开云登录网站状态,
姿态。创建Kaiyun平台 开云体育官方入口数据点的信息如图2.5所示。其中设置采摘最大统计数量为65536,并且为可写
本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运
案例。所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc
进程应由一个中央位置进行控制(如由一个主机或 PLC),则这一控制通过
控制 /
规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动
调度软件和管理平台调度软件和管理平台是指在上位机(服务器)上实现的软件,用于对移动
自编程是如何完成的。 自编程其实也不是很高深的问题。 当用户给出参数时,有时也包括逻辑。 例如用户说,如果设备打开完毕,执行一个命令。 这个例子就包括了一个如果。你的智能
本案例是西门子1200PLC通过Profinet转Modbus TCP网关连接搬运
案例,所需设备为西门子1200PLC,耐用通信技术Profinet转ModbusTCP网关,搬运
处理这些数据,我们要处理的是手指的空间位置,也就是xyz坐标。 然后处理夹具的开关。 所以,我们日常程序必须备份。这些程序可以
中,控制器通过对步进电机芯片输出的脉冲信号进行控制,使得步进电机以一定的步距旋转,从而实现
鸿蒙开发接口Ability框架:【@ohos.application.Ability (Ability)】
采用图腾柱拓扑结构的6.6kW OBC评估板SEC-6D6KW-OBC-TTP-GEVB数据手册
飞凌嵌入式ElfBoard ELF 1板卡-在ELF 1开发环境中使用QT Creator进行远程调试


 官方微信
官方微信





